どうすればいいのか?
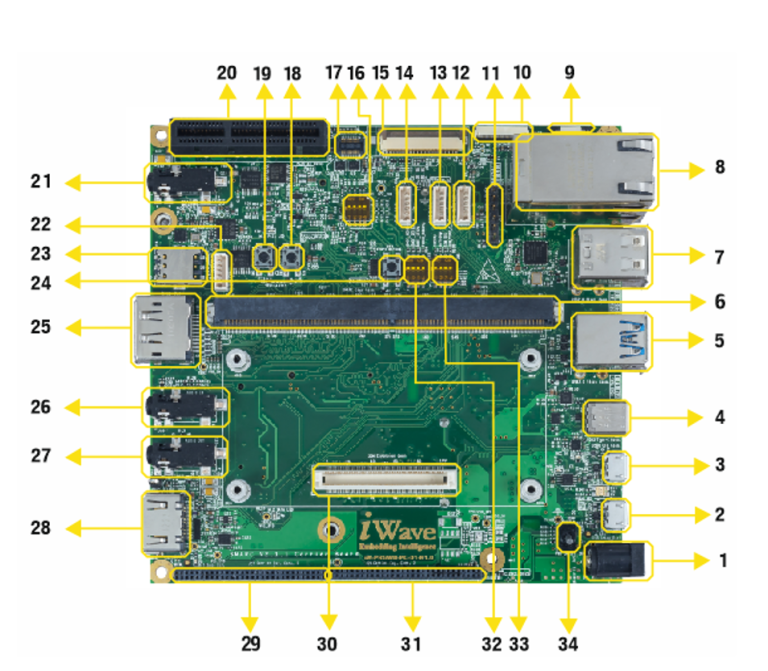
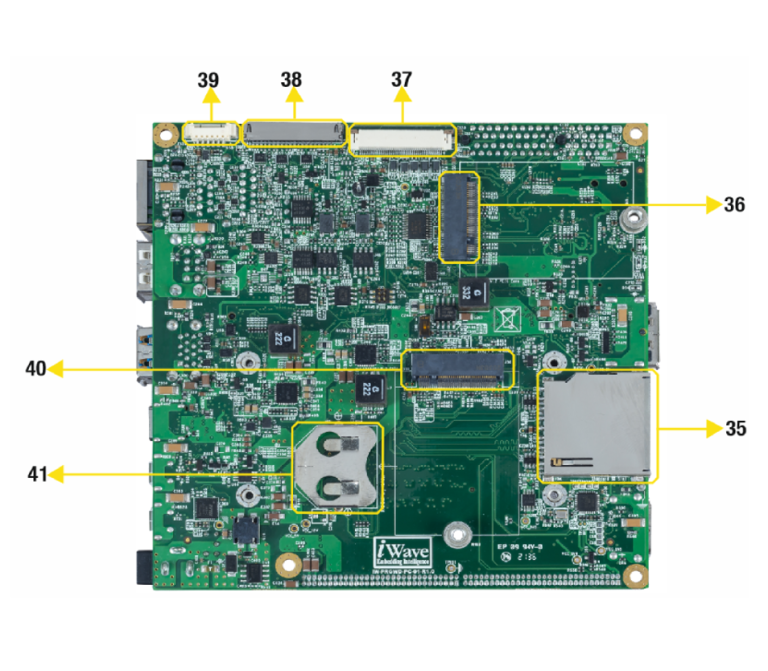
i.MX 8M Plus SMARC開発プラットフォームを始めよう









ミニコム・チュートリアル
チュートリアル
パテ・チュートリアル
ミニコム・チュートリアル
- Linuxホスト・マシンのコマンド・プロンプトで、以下のコマンドを実行し、ポート番号を確認する。
$ ls /dev/ttyUSB* - 小さい数字がArm® Cortex®-A53コア、大きい数字がArm® Cortex®-M4コアです。
Minicom
シリアル通信プログラム(例としてminicom)をインストールして実行するには、以下のコマンドを使用します:
- Ubuntuパッケージマネージャを使用してMinicomをインストールします。
$ sudo apt-get install minicom
$ sudo minicom -s 先ほど決定したポート番号を使って、コンソールウィンドウからMinicomを起動する。- 下図のようにミニコムを設定する。
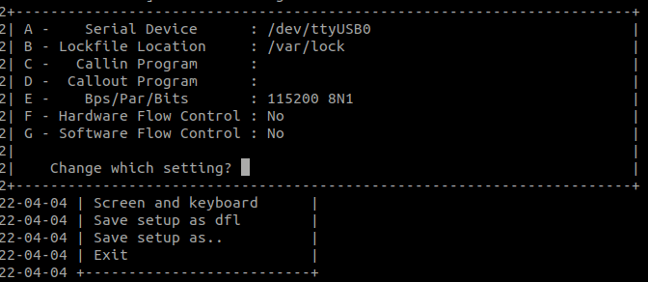
- 次のステップは、ボードの電源を入れることである。
チュートリアル
http://ftdichip.com/drivers/vcp-drivers/以下のリンクから、ホストPC/ノートPCにデバッグUSBポート用ドライバーをインストールしてください。
- Tera Term をダウンロードする。ダウンロード後、インストーラーを実行し、このページに戻ってください。
- TeraTermを起動する。初回起動時は以下のダイアログが表示されます。シリアルオプションを選択する。ボードが接続されていると仮定すると、リストにCOMポートが自動的に入力されているはずです。
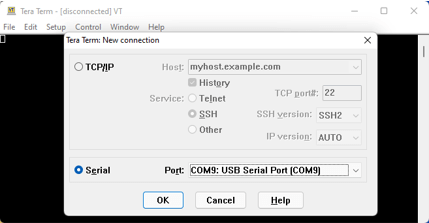
Setup Serial Portに進み、以下のように設定を変更します。
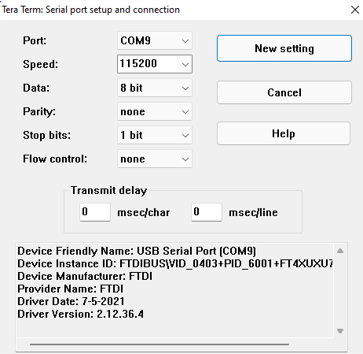
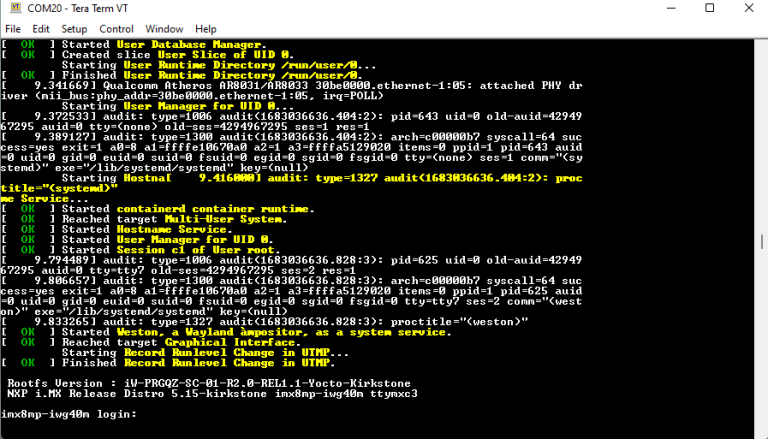
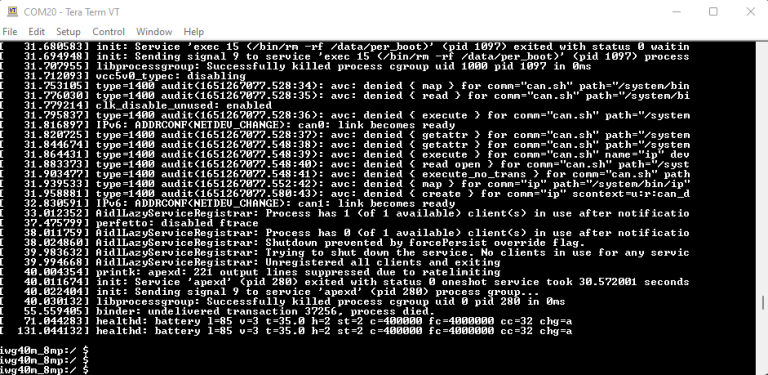
- 接続が開かれていることを確認する。接続されていれば、Tera Term のタイトルバーに以下のような表示が出る。
![]()
![]()
- 次のステップは、ボードの電源を入れることである。
パテ・チュートリアル
http://ftdichip.com/drivers/vcp-drivers/以下のリンクから、ホストPC/ノートPCにデバッグUSBポート用ドライバーをインストールしてください。
- PuTTYをダウンロードします。ダウンロード後、インストーラを実行し、このウェブページに戻って続行します。
- ダウンロードした実行ファイルをダブルクリックするか、選択したダウンロードの種類に応じてスタートメニューからPuTTYを起動します。
- 設定起動したウィンドウでSerial ラジオボタンを選択し、先ほど決定した COM ポート番号を入力します。また、ボーレート115200を入力します。
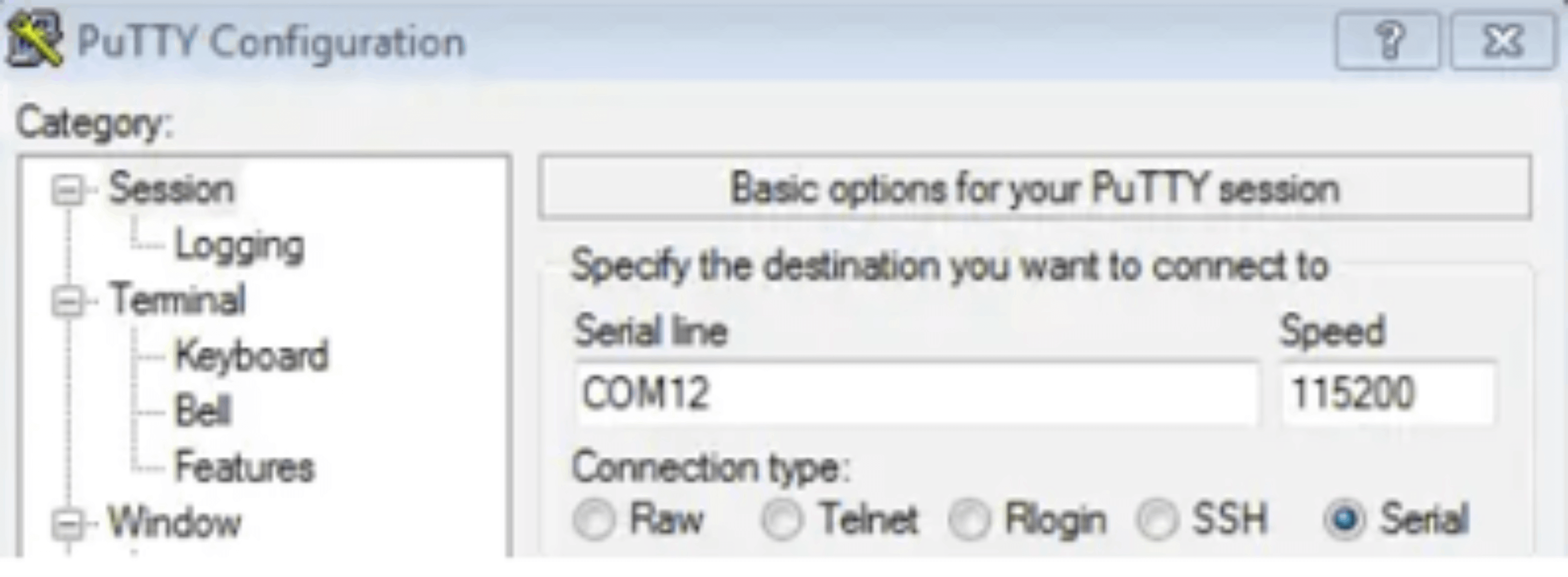
- Open をクリックしてシリアル接続を開く。ボードが接続され、正しい COM ポートを入力したと仮定すると、ターミナルウィンドウが開きます。設定が正しくない場合、puTTY が警告を発します。
- 次のステップは、ボードの電源を入れることである。